ABB SCARA 機器人現場定義工具坐標系的操作方法
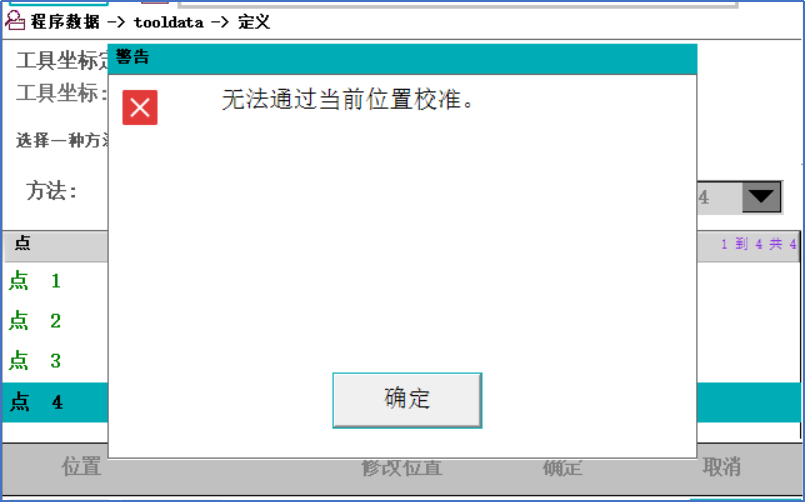
6軸串聯型機器人定義工具坐標系的方法,并不適用于四軸scara機器人,當我們試圖使用同樣的方法定義scara機器人的工具坐標系時,會如下圖所示,提示無法通過當前位置校準。
那對于scara機器人我們該如何現場定義工具坐標系呢?由于機械結構的限制,scara機器人只具有4個自由度,只能作Rz旋轉,無法作Rx、Ry旋轉。因此對于scara機器人的工具坐標系,一般只定義工作坐標系的原點,使用于tool0的默認方向作為新建工具坐標系的方向。
現場示教四軸scara機器人的工具坐標系,可遵循以下步驟進行操作:
1.在現場,先將機器人工具拆除,將四軸端面移動到與錐尖參考點同一高度,記錄下此時tool0在base坐標系下的坐標值(示教為P10點),如下圖所示。
CONST robtarget p10:=[[500,150,100],[0,0.05879971,0.9982698,0],[-1,-2,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
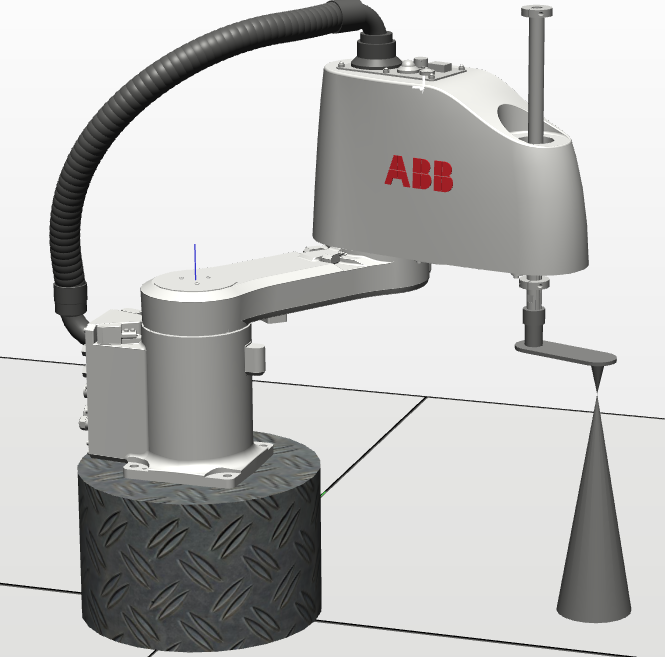
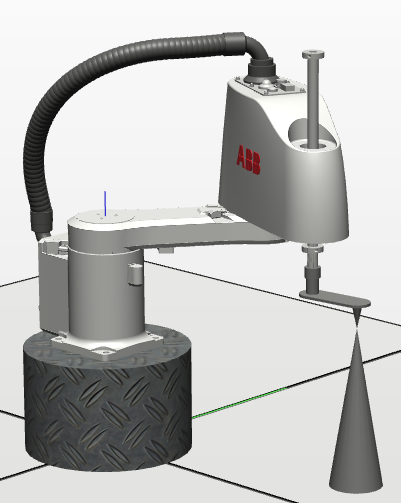
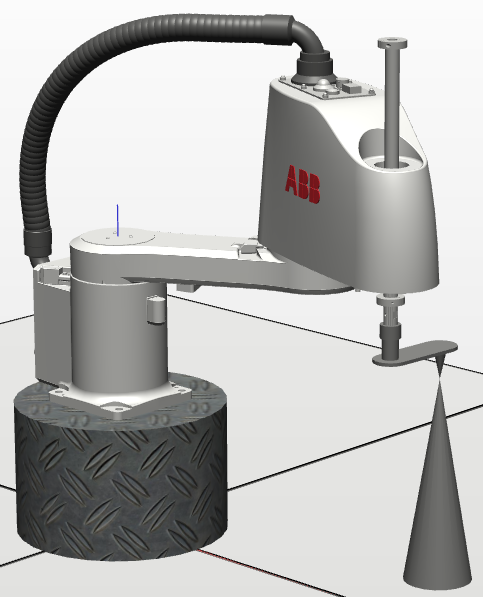
2.在現場,讓機器人以3種不同的姿態,將工具作業點移動至錐尖參考點,并且以tool0&Base為參考坐標系,示教為P1、P2、P3點。
CONST robtarget p1:=[[399.9998,149.9999,200],[0,1,5.364418E-07,0],[-1,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p2:=[[496.75,50.05286,200],[0,0.7185054,0.6955214,0],[-1,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p3:=[[599.3085,138.2604,200],[0,0.05879981,0.9982698,0],[-1,2,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
3.在RS上新建一個虛擬工作站,導入與現場機器人型號一致的機器人模型,將P1、P2、P3、p10點數據導入虛擬工作站中;
4.在RS虛擬工作站編寫并運行以下程序:
MODULE Module1
CONST robtarget p1:=[[399.9998,149.9999,200],[0,1,5.364418E-07,0],[-1,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p2:=[[496.75,50.05286,200],[0,0.7185054,0.6955214,0],[-1,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p3:=[[599.3085,138.2604,200],[0,0.05879981,0.9982698,0],[-1,-2,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p10:=[[500,150,100],[0,0.05879971,0.9982698,0],[-1,-2,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
VAR pos teach_point{3};
VAR num radius;
VAR pos center;
VAR pos normal;
PROC main()
MoveJ p1,v150,fine,tool0;
MoveJ p2,v150,fine,tool0;
MoveJ p3,v150,fine,tool0;
teach_point{1}:=p1.trans;
teach_point{2}:=p2.trans;
teach_point{3}:=p3.trans;
FitCircle teach_point,center,radius,normal;
center.z:=center.z+(p1.trans.z-p10.trans.z);
TPWrite "TCP is "\Pos:=center;
ENDPROC
ENDMODULE
|
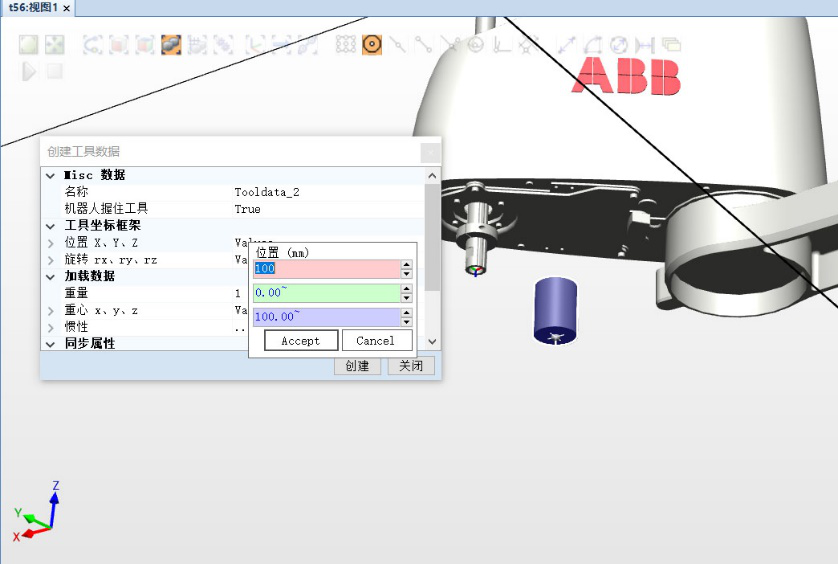
5.在虛擬工作站中,以center的坐標值為底面中心點,建立一個各軸旋轉方向為0的圓柱體,將圓柱底面圓心點,捕捉為機器人TCP的位置,工具坐標系的方向使用默認值,建立工具坐標系tooldata_2。
6.將虛擬工作站中的tooldata_2工具坐標系數據導入現場機器人,即可得到一個以機器人工具作業點為TCP,與tool0方向相同的工具坐標系。
對于看完本文后有以下任意情形之一的,請聯系“玩轉工業機器人”公眾號編者,預約現場解答:
1.看不懂給出的程序;
2.不清楚程序數據如何在虛擬工作站于真實控制器間傳遞;
3.不懂RobotStudio軟件如何使用;
4.不會機器人的基本操作;
5.完全一臉懵逼。
小編,在廣東智通職業培訓學院等你喔!
智通教育是東莞市專業的工業機器人培訓機構,平時會不定期的在網站發布一些工業機器人課程相關的知識點,有興趣的同學歡迎大家關注本網站!
 粵公網安備 44190002001278
粵公網安備 44190002001278