機(jī)器人培訓(xùn)專家為您介紹IRB360機(jī)器人坐標(biāo)系,手動(dòng)關(guān)節(jié)操作以及手動(dòng)線性、重定位操作
時(shí)間:2021-08-16 17:44
來源:
一、 IRB360機(jī)器人坐標(biāo)系
1.1 ??IRB360機(jī)器人坐標(biāo)系
工業(yè)機(jī)器人培訓(xùn)找哪里最好?坐標(biāo)系:ABB機(jī)器人使用若干坐標(biāo)系,每一個(gè)坐標(biāo)系都適用與特定類型的微動(dòng)控制或者編程。
世界坐標(biāo)系:也叫大地坐標(biāo)系,在工作單元或工作站中固定位置及其相應(yīng)零點(diǎn),默認(rèn)情況下世界坐標(biāo)系和機(jī)器人基坐標(biāo)系重合。但是IRB360機(jī)器人安裝一般都是倒裝,所以其基坐標(biāo)與世界坐標(biāo)系某些軸方向不一致。
基座標(biāo)系:原點(diǎn)固定于機(jī)器人基座,方向也是固定符合人站在機(jī)器人正后方朝前右手XYZ指向?yàn)檎较颉?/span>
工具坐標(biāo)系:定義機(jī)器人到達(dá)預(yù)定義目標(biāo)點(diǎn)時(shí)候使用工具的位置,及參考點(diǎn),一般工具坐標(biāo)系原點(diǎn)縮寫TCP,機(jī)器人運(yùn)行就是將參照的TCP移動(dòng)到編程目標(biāo)點(diǎn)位置。
工件坐標(biāo)系:定義工件相對于大地坐標(biāo)系或者其他指定工件坐標(biāo)系的位置,經(jīng)常用于對機(jī)器人進(jìn)行編程,一般記錄點(diǎn)位都會(huì)根據(jù)產(chǎn)品在不同工件上面工作而選擇不同工件坐標(biāo)系來記錄點(diǎn)位。
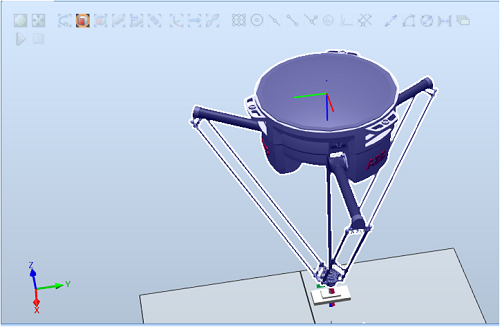
IRB360坐標(biāo)系如下:
IRB360機(jī)器人世界坐標(biāo)系:和其他機(jī)器人一樣;
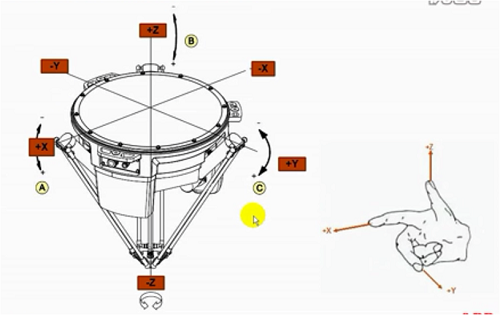
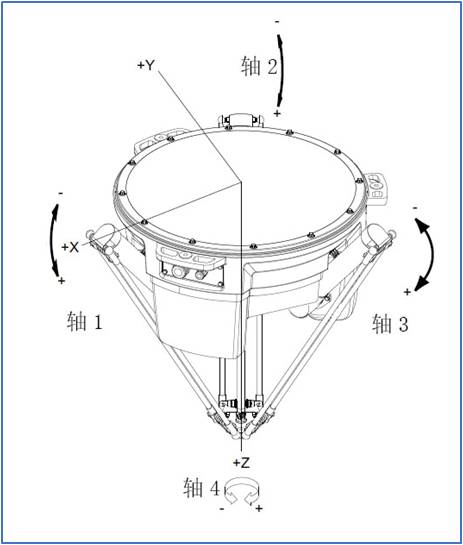
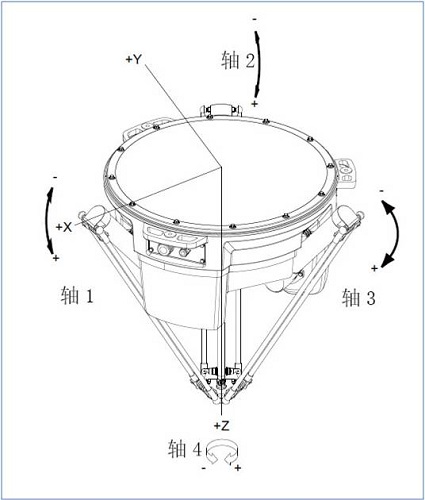
基座標(biāo)系:如右圖所示,Y、Z軸方向和世界坐標(biāo)相反,單臺機(jī)器人時(shí)候不在與世界坐標(biāo)不重合;工業(yè)機(jī)器人培訓(xùn)找哪里最好?(安裝并聯(lián)機(jī)器人到框架支架上時(shí)候盡量讓1軸和世界坐標(biāo)X軸方向一致。)
工具坐標(biāo)系:第四軸法蘭中中心,Z軸方向垂直法蘭平面;
工件坐標(biāo)系:一般和輸送鏈工作,使用輸送鏈工件坐標(biāo)系;
1.2 ??IRB360機(jī)器人基坐標(biāo)系和世界坐標(biāo)系
IRB360坐標(biāo)系如下:
IRB360機(jī)器人世界坐標(biāo)系:和其他機(jī)器人一樣;
基座標(biāo)系:如右圖所示,Y、Z軸方向和世界坐標(biāo)相反,單臺機(jī)器人時(shí)候不在與世界坐標(biāo)不重合;(安裝并聯(lián)機(jī)器人到框架支架上時(shí)候盡量讓1軸和世界坐標(biāo)X軸方向一致。)
工具坐標(biāo)系:第四軸法蘭中中心,Z軸方向垂直法蘭平面;
工件坐標(biāo)系:一般和輸送鏈工作,使用輸送鏈工件坐標(biāo)系;
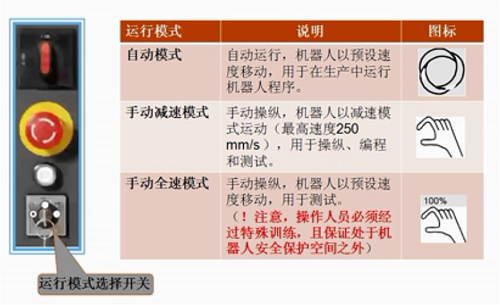
手動(dòng)操作IRB360機(jī)器人各個(gè)關(guān)節(jié)軸時(shí)和6軸機(jī)器人相同,在控制柜上旋轉(zhuǎn)要是開關(guān)到手動(dòng)狀態(tài),然后進(jìn)行手動(dòng)操作。
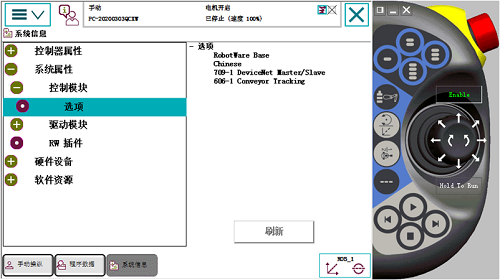
手動(dòng)操作IRB360機(jī)器人各個(gè)關(guān)節(jié)軸時(shí)和6軸機(jī)器人相同,不同的是并聯(lián)機(jī)器人IRB360機(jī)器人每個(gè)軸位置不同。1軸為動(dòng)力電纜、編碼器電纜最近的軸,然后2軸、3軸順時(shí)針旋轉(zhuǎn),4軸為下面安裝工具軸,具體見下示教器圖片:

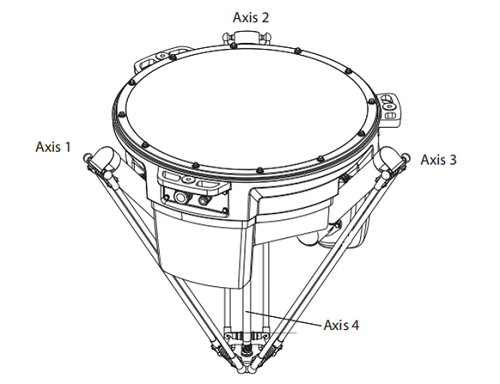
2.2?? IRB360機(jī)器人四個(gè)關(guān)節(jié)軸
IRB360機(jī)器人一般都是四軸,每個(gè)軸如右圖片。工業(yè)機(jī)器人培訓(xùn)找哪里最好?控制柜和機(jī)器人本體連接的動(dòng)力線、編碼線插頭位置最近軸為1軸,順時(shí)針旋轉(zhuǎn)對應(yīng)2軸、3軸,4軸為下面安裝工具。
三、IRB360機(jī)器人手動(dòng)線性、重定位操作
3.1? IRB360機(jī)器人手動(dòng)線性操作
ABB并聯(lián)IRB360機(jī)器人手動(dòng)線性操作和6軸機(jī)器人操作一致,具體見操作演示。區(qū)域在于IRB360機(jī)器人倒掛安裝在框架支架上,盡量讓基座標(biāo)系X軸和世界坐標(biāo)系X軸方向相同,然后Y軸、Z軸方向和世界坐標(biāo)系的相反。
ABB并聯(lián)IRB360機(jī)器人手動(dòng)線性操作和6軸機(jī)器人操作一致,具體見操作演示。。

3.2? IRB360機(jī)器人手動(dòng)重定位運(yùn)行
重定位是指機(jī)器人末端工具TCP位置不同,以TCP為中心繞著所選擇坐標(biāo)系的X、Y、Z軸做旋轉(zhuǎn)運(yùn)動(dòng),也可以理解為機(jī)器人繞著工具的TCP點(diǎn)做姿態(tài)調(diào)整。系統(tǒng)默認(rèn)繞著工具坐標(biāo)系做重定位運(yùn)動(dòng)。
ABB并聯(lián)IRB360機(jī)器人手動(dòng)線性操作和6軸機(jī)器人操作一致,一般只進(jìn)行繞Z軸重定位運(yùn)行,具體見實(shí)操。

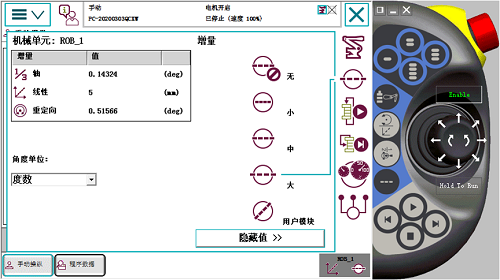
3.3 IRB360機(jī)器人手動(dòng)增量式操作
ABB并聯(lián)IRB360機(jī)器人手動(dòng)增量式操作和6軸機(jī)器人一致。采用增量式移動(dòng)機(jī)器人,可以對機(jī)器人進(jìn)行微小幅度調(diào)整,可以非常精確緊湊定位操作。
搖桿每偏轉(zhuǎn)依次,機(jī)器人就移動(dòng)一步增量值,如果搖桿偏移持續(xù)一秒鐘或者數(shù)秒鐘,機(jī)器人就會(huì)持續(xù)移動(dòng),速率為每秒10步。

ABB并聯(lián)IRB360機(jī)器人手動(dòng)增量式操作和6軸機(jī)器人一致。
四、課程總結(jié)
4.1 總結(jié)
本節(jié)課主要了解了IRB360并聯(lián)機(jī)器人型號參數(shù)、應(yīng)用、硬件組成、坐標(biāo)系,手動(dòng)關(guān)節(jié)、線性、重定位運(yùn)行。還了解了機(jī)器人運(yùn)輸安裝,了解各個(gè)關(guān)節(jié)軸和氣管安裝。熟練操作機(jī)器人,理解IRB360機(jī)器人和6軸機(jī)器人異同。
想了解更多東莞工業(yè)機(jī)器人培訓(xùn)資訊?智通教育20年致力于東莞工業(yè)機(jī)器人培訓(xùn)、PLC培訓(xùn)、電工培訓(xùn)等培訓(xùn)項(xiàng)目,詳情聯(lián)系:0769-8707-8535.
1.1 ??IRB360機(jī)器人坐標(biāo)系
工業(yè)機(jī)器人培訓(xùn)找哪里最好?坐標(biāo)系:ABB機(jī)器人使用若干坐標(biāo)系,每一個(gè)坐標(biāo)系都適用與特定類型的微動(dòng)控制或者編程。
世界坐標(biāo)系:也叫大地坐標(biāo)系,在工作單元或工作站中固定位置及其相應(yīng)零點(diǎn),默認(rèn)情況下世界坐標(biāo)系和機(jī)器人基坐標(biāo)系重合。但是IRB360機(jī)器人安裝一般都是倒裝,所以其基坐標(biāo)與世界坐標(biāo)系某些軸方向不一致。
基座標(biāo)系:原點(diǎn)固定于機(jī)器人基座,方向也是固定符合人站在機(jī)器人正后方朝前右手XYZ指向?yàn)檎较颉?/span>
工具坐標(biāo)系:定義機(jī)器人到達(dá)預(yù)定義目標(biāo)點(diǎn)時(shí)候使用工具的位置,及參考點(diǎn),一般工具坐標(biāo)系原點(diǎn)縮寫TCP,機(jī)器人運(yùn)行就是將參照的TCP移動(dòng)到編程目標(biāo)點(diǎn)位置。
工件坐標(biāo)系:定義工件相對于大地坐標(biāo)系或者其他指定工件坐標(biāo)系的位置,經(jīng)常用于對機(jī)器人進(jìn)行編程,一般記錄點(diǎn)位都會(huì)根據(jù)產(chǎn)品在不同工件上面工作而選擇不同工件坐標(biāo)系來記錄點(diǎn)位。
IRB360坐標(biāo)系如下:
IRB360機(jī)器人世界坐標(biāo)系:和其他機(jī)器人一樣;
基座標(biāo)系:如右圖所示,Y、Z軸方向和世界坐標(biāo)相反,單臺機(jī)器人時(shí)候不在與世界坐標(biāo)不重合;工業(yè)機(jī)器人培訓(xùn)找哪里最好?(安裝并聯(lián)機(jī)器人到框架支架上時(shí)候盡量讓1軸和世界坐標(biāo)X軸方向一致。)
工具坐標(biāo)系:第四軸法蘭中中心,Z軸方向垂直法蘭平面;
工件坐標(biāo)系:一般和輸送鏈工作,使用輸送鏈工件坐標(biāo)系;
1.2 ??IRB360機(jī)器人基坐標(biāo)系和世界坐標(biāo)系
IRB360坐標(biāo)系如下:
IRB360機(jī)器人世界坐標(biāo)系:和其他機(jī)器人一樣;
基座標(biāo)系:如右圖所示,Y、Z軸方向和世界坐標(biāo)相反,單臺機(jī)器人時(shí)候不在與世界坐標(biāo)不重合;(安裝并聯(lián)機(jī)器人到框架支架上時(shí)候盡量讓1軸和世界坐標(biāo)X軸方向一致。)
工具坐標(biāo)系:第四軸法蘭中中心,Z軸方向垂直法蘭平面;
工件坐標(biāo)系:一般和輸送鏈工作,使用輸送鏈工件坐標(biāo)系;
二、IRB360機(jī)器手動(dòng)關(guān)節(jié)操作
2.1?? IRB360機(jī)器人手動(dòng)關(guān)節(jié)操作
手動(dòng)操作IRB360機(jī)器人工作站創(chuàng)建。
2.1?? IRB360機(jī)器人手動(dòng)關(guān)節(jié)操作
手動(dòng)操作IRB360機(jī)器人工作站創(chuàng)建。
手動(dòng)操作IRB360機(jī)器人各個(gè)關(guān)節(jié)軸時(shí)和6軸機(jī)器人相同,在控制柜上旋轉(zhuǎn)要是開關(guān)到手動(dòng)狀態(tài),然后進(jìn)行手動(dòng)操作。
手動(dòng)操作IRB360機(jī)器人各個(gè)關(guān)節(jié)軸時(shí)和6軸機(jī)器人相同,不同的是并聯(lián)機(jī)器人IRB360機(jī)器人每個(gè)軸位置不同。1軸為動(dòng)力電纜、編碼器電纜最近的軸,然后2軸、3軸順時(shí)針旋轉(zhuǎn),4軸為下面安裝工具軸,具體見下示教器圖片:
2.2?? IRB360機(jī)器人四個(gè)關(guān)節(jié)軸
IRB360機(jī)器人一般都是四軸,每個(gè)軸如右圖片。工業(yè)機(jī)器人培訓(xùn)找哪里最好?控制柜和機(jī)器人本體連接的動(dòng)力線、編碼線插頭位置最近軸為1軸,順時(shí)針旋轉(zhuǎn)對應(yīng)2軸、3軸,4軸為下面安裝工具。
?????? IRB360機(jī)器人安裝時(shí)候,盡量使得1軸方向通世界坐標(biāo)系X軸方向。
三、IRB360機(jī)器人手動(dòng)線性、重定位操作
3.1? IRB360機(jī)器人手動(dòng)線性操作
ABB并聯(lián)IRB360機(jī)器人手動(dòng)線性操作和6軸機(jī)器人操作一致,具體見操作演示。區(qū)域在于IRB360機(jī)器人倒掛安裝在框架支架上,盡量讓基座標(biāo)系X軸和世界坐標(biāo)系X軸方向相同,然后Y軸、Z軸方向和世界坐標(biāo)系的相反。
ABB并聯(lián)IRB360機(jī)器人手動(dòng)線性操作和6軸機(jī)器人操作一致,具體見操作演示。。
3.2? IRB360機(jī)器人手動(dòng)重定位運(yùn)行
重定位是指機(jī)器人末端工具TCP位置不同,以TCP為中心繞著所選擇坐標(biāo)系的X、Y、Z軸做旋轉(zhuǎn)運(yùn)動(dòng),也可以理解為機(jī)器人繞著工具的TCP點(diǎn)做姿態(tài)調(diào)整。系統(tǒng)默認(rèn)繞著工具坐標(biāo)系做重定位運(yùn)動(dòng)。
ABB并聯(lián)IRB360機(jī)器人手動(dòng)線性操作和6軸機(jī)器人操作一致,一般只進(jìn)行繞Z軸重定位運(yùn)行,具體見實(shí)操。
3.3 IRB360機(jī)器人手動(dòng)增量式操作
ABB并聯(lián)IRB360機(jī)器人手動(dòng)增量式操作和6軸機(jī)器人一致。采用增量式移動(dòng)機(jī)器人,可以對機(jī)器人進(jìn)行微小幅度調(diào)整,可以非常精確緊湊定位操作。
搖桿每偏轉(zhuǎn)依次,機(jī)器人就移動(dòng)一步增量值,如果搖桿偏移持續(xù)一秒鐘或者數(shù)秒鐘,機(jī)器人就會(huì)持續(xù)移動(dòng),速率為每秒10步。
ABB并聯(lián)IRB360機(jī)器人手動(dòng)增量式操作和6軸機(jī)器人一致。
四、課程總結(jié)
4.1 總結(jié)
本節(jié)課主要了解了IRB360并聯(lián)機(jī)器人型號參數(shù)、應(yīng)用、硬件組成、坐標(biāo)系,手動(dòng)關(guān)節(jié)、線性、重定位運(yùn)行。還了解了機(jī)器人運(yùn)輸安裝,了解各個(gè)關(guān)節(jié)軸和氣管安裝。熟練操作機(jī)器人,理解IRB360機(jī)器人和6軸機(jī)器人異同。
想了解更多東莞工業(yè)機(jī)器人培訓(xùn)資訊?智通教育20年致力于東莞工業(yè)機(jī)器人培訓(xùn)、PLC培訓(xùn)、電工培訓(xùn)等培訓(xùn)項(xiàng)目,詳情聯(lián)系:0769-8707-8535.
 粵公網(wǎng)安備 44190002001278
粵公網(wǎng)安備 44190002001278